




Applications
- Surveillance de l'occupant et du conducteur (OMS/DMS)
- Caméra ADAS
- Caméras de recul
- Miroir électronique
- Surveillance de l'environnement
- Enregistreur vidéo numérique pour voiture
- Affichage tête haute (HUD)
Caractéristiques
- Prise en charge RGB-IR
- Processeur géométrique eWARP
- 120 dB HDR ISP
- Moteur de superposition graphique
- Faible consommation
- AEC-Q100 Grade 2
- ASIL-B
Diagramme fonctionnel
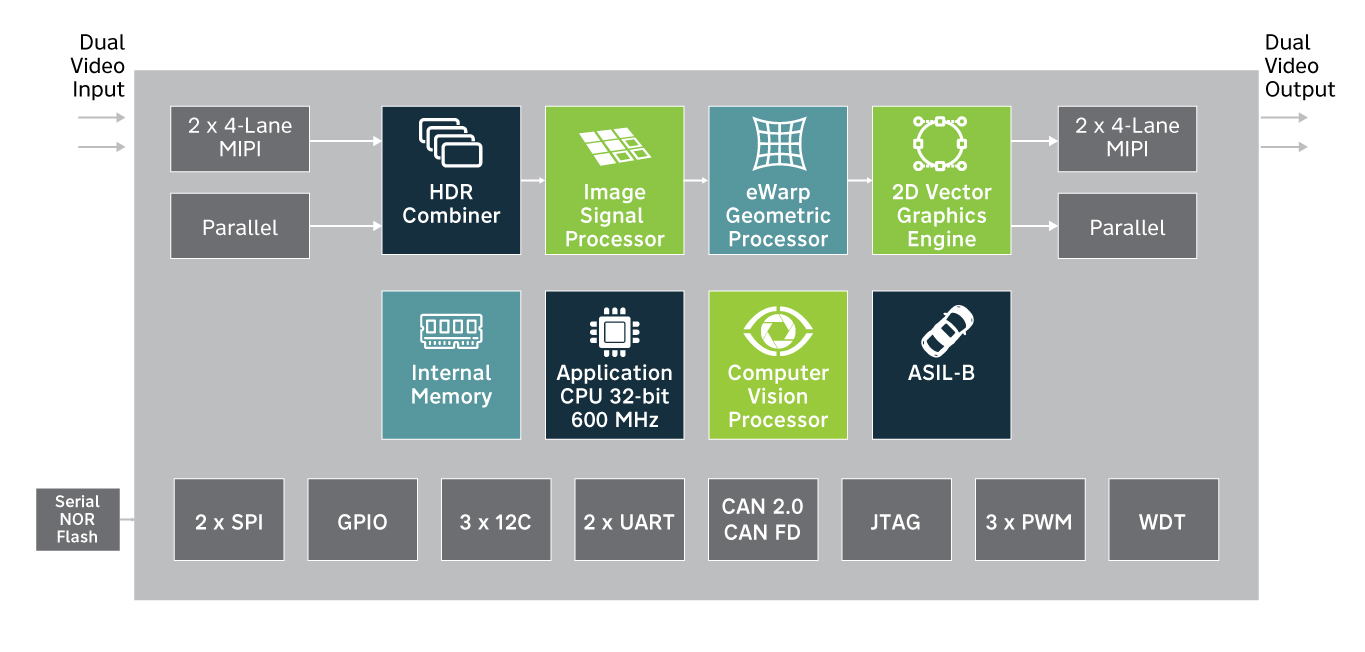
Le GW5 est un système sur puce (SoC) avancé de type CVP (Camera Video Processor) conçu pour les systèmes avancés d'aide à la conduite (ADAS) et la détection infrarouge RGB (RGB-IR) dans l'habitacle. Le GW5 comprend un processeur de signal d'image (ISP) innovant à gamme dynamique élevée (HDR), le processeur géométrique eWARP® de 5ème génération, une fonctionnalité graphique 2D et un processeur de vision par ordinateur. Conçu dans un processus de 28nm pour permettre des caméras automobiles de petite taille et de faible puissance, le GW5 est compatible avec les normes ASIL-B et AEC Q100 Grade 2.
Le GW5 prend en charge jusqu'à 8MP pour les capteurs conventionnels et jusqu'à 5MP pour les capteurs RVB-IR.
Le traitement RVB-IR utilise un algorithme de démosaïque propriétaire qui traite les motifs de la matrice de filtres RVB-IR 4×4. Le mode de sortie RVB est optimisé pour obtenir des couleurs correctes et une suppression totale de l'IR. Le mode de sortie IR uniquement permet de récupérer la résolution et d'obtenir des performances comparables à celles des capteurs IR monochromes avec un nombre de pixels quatre fois supérieur. La ou les sorties vidéo sont configurables entre une double sortie RVB + IR ou une sortie de commutation en mode jour/nuit optimisée par le rapport signal/bruit (SNR).
L'ISP HDR prend en charge les techniques HDR et LED Flicker Mitigation (LFM) les plus avancées disponibles sur les derniers capteurs automobiles. Le moteur graphique vectoriel rend des graphiques haute résolution en temps réel pour les superposer au flux vidéo, ce qui permet de créer des interfaces utilisateur attrayantes.
Le GW5 réduit le nombre de composants du système en ne nécessitant pas de mémoire externe à double débit de données (DDR) et en incorporant deux entrées de caméra. Les conceptions basées sur le GW5 peuvent être rapidement mises sur le marché en tirant parti des kits d'évaluation et de conception logicielle d'indie.
| Nom de l'appareil | Vitesse de l'unité centrale | ISP HDR | RGB-IR | CVP | Sortie MIPI | Boîtier | Épingles |
|---|---|---|---|---|---|---|---|
| GW5200 | 500 MHz | 2,5 MP | Non | Non | 1x | TFBGA à 169 billes | 7x7mm 0,50mm pas |
| GW5210 | 500 MHz | 2,5 MP | Non | Non | 2x | TFBGA à 196 billes | 10x10mm 0,65mm pas |
| GW5300 | 500 MHz | 8 DÉPUTÉS | Non | Non | 1x | TFBGA à 169 billes | 7x7mm 0,50mm pas |
| GW5310 | 500 MHz | 8 DÉPUTÉS | Non | Non | 2x | TFBGA à 196 billes | 10x10mm 0,65mm pas |
| GW5400 | 600 MHz | 8 DÉPUTÉS | Oui | Oui | 1x | TGBGA à 169 billes | 7x7mm 0,50mm pas |
| GW5410 | 600 MHz | 8 DÉPUTÉS | Oui | Oui | 2x | TGBGA à 196 billes | 10x10mm 0,65mm pas |
Processeur géométrique eWarp
- Processeur géométrique eWARP® de 5e génération
- Correction de la distorsion de l'objectif pour un champ de vision ultra large (FOV)
- Pan/Tilt/Zoom électronique dynamique (ePTZ)
- Calibrage numérique pour systèmes à caméra unique ou multiple
- Latence ultra-faible (typiquement 1/6ème d'image)
- Cartes de déformation programmables hautement flexibles
Processeur de signal d'image HDR
- ISP prenant en charge les modes suivants :
- Jusqu'à 8M30 ou 5MP60 d'entrée de capteur d'image unique (combineur HDR dans le capteur d'image)2,3
- Jusqu'à 2 MP60entrée capteur d'image unique1
- Jusqu'à 2 MP60 parentrée double capteur d'image1
- Jusqu'à 2MP60Traitement RVB-IR 4×43
- Entrée pour capteur d'image RVB-IR unique jusqu'à 5 MP/60 ips (remosaïque IR dans le capteur d'image)3
- Traitement HDR (High Dynamic Range)
- Combinaison sur puce de 2, 3 et 4 expositions
- Traitement HDR jusqu'à 20 bits
- Cartographie locale avancée des tonalités
- Réduction avancée du bruit spatial (2D)
- Statistiques par zone pour l'exposition automatique (AE) et la balance des blancs automatique (AWB)
- Netteté bidimensionnelle non linéaire
- Correction dynamique des défauts et de l'ombrage des lentilles
- Réduction du bruit chromatique
- Prise en charge Defog
Processeur Xtensa® 32 bits
- Fonctionnement jusqu'à6003/5001,2 MHz
- Caches d'instructions et de données de 32 Ko
- FPU à précision simple
Processeur de vision par ordinateur3
- Unités scalaires et vectorielles
- Fonctions VLIW (Very Long Instruction Word) et SIMD (Single Instruction Multiple Data)
- Jeu d'instructions natif pour opérations mathématiques non linéaires
Moteur de superposition graphique
- Accélérateur graphique vectoriel 2D
- 1920 × 1080 à 60 images par seconde
- Prise en charge du rendu à la volée
- Moteur de tessellation pour lignes, courbes de Bézier quadratiques et cubiques
- Moteurs d'imagerie et de pixels pour le rendu et la composition d'images
- Prise en charge des bitmaps animés
- Résolution OSD jusqu'à 4096 × 2048
- Huit couches graphiques
- 256 couleurs sélectionnables parmi une gamme de couleurs réelles 24 bpp
- Prise en charge de l'anticrénelage à l'aide de la couleur par couleur alpha
Interfaces vidéo E/S
- Entrée : 2x MIPI CSI-2 4 voies (1,5 Gbps/voie)
- Sortie GW5x00 : 1x MIPI CSI-2 4 voies (1,5 Gbps/voie)
- Sortie GW5x10 : 2x MIPI CSI-2 4 voies (1,5 Gbps/voie)
- Entrée : interface parallèle 16 bits (horloge d'interface 150 MHz)
- Sortie : parallèle 16 bits (horloge d'interface 150 MHz)
Caractéristiques du système
- Interface contrôleur CAN 2.0B et FD
- 3xI2C, 2xSPI, 2x UART, 15x GPIO, 3x PWM
- Débogage JTAG
- eFuse (128 bits)
Sécurité automobile
- Prend en charge les systèmes ASIL-B
- Prise en charge ECC pour tous les espaces de code du processeur
- Prise en charge intégrée de la robustesse sur l'interface de contrôle hôte
- Minuterie Watch Dog
- Vidéo intégrée et statistiques système dans le flux de sortie
- Capteurs de processus, de tension et de température
Spécifications électriques
- Tension d'alimentation centrale : 0,9 V ± 5 %
- Tensions d'alimentation E/S : 1,8 V ou 2,5 V ou 3,3 V ±5 %
- (Un seul requis)
- Tension d'alimentation de la PLL : 1,8V ±5%.
- Tension d'alimentation MIPI : 1,8 V ± 5 %
- Norme automobile : AEC Q100 Grade 2
[1] – GW5200 ; [2] – GW5300 ; [3] – GW5400